
 ご相談・お問い合わせ
ご相談・お問い合わせ
多自由度ロボットを簡単に制御可能にする流体ネットワーク


東 和樹 HIGASHI Kazuki
附属フューチャーイノベーションセンター/機械工学専攻 助教
知能機械システム学領域 東森研究室
キーワード
ロボット、機構、AI
重点分野
ロボティクス
ここがポイント!【研究内容】
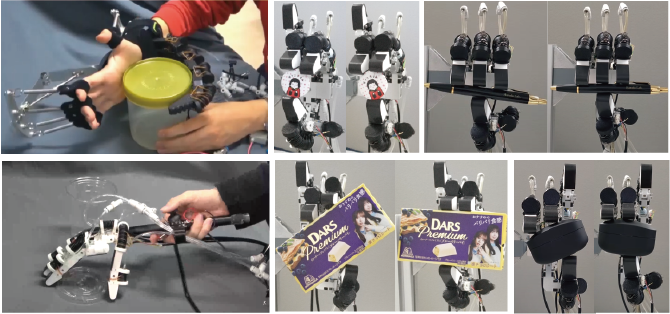
人の身の回りで働くロボットには,人にとって安全で取り扱いやすいことが求められる.流体ネットワークは,ロボットによる複雑かつ器用な動作と直感的で簡単な制御を両立できる力の伝達システムである.また,媒体としては水が用いられるため人体にも安全であり,システムの小型化にも寄与する.流体ネットワークを活用して製作された人型ロボットハンドは,1自由度の圧力入力で様々な形状の対象物を把持したままの操作を実現した.これらの特徴を基盤とし,様々なロボットへの流体ネットワークの導入を進めている.
応用分野
マニピュレーション、人間拡張
論文・解説等
- [1] Higashi Keisuke et. al. “Synergy Hand Using Fluid Network: Realization of Various Grasping/Manipulation Styles,” IEEE Access, 2024.
- [2] 山本,東ら,「シナジー切り替え可能な指型ウェアラブルアシストロボット」,日本ロボット学会誌,2023
- [3] Higashi et al., “Functionally Divided Manipulation Synergy”, IEEE IROS, 2020