
 ご相談・お問い合わせ
ご相談・お問い合わせ
多種多芸なロボットの協調で紐解くコラボレーションロボット工学


末岡 裕一郎 SUEOKA Yuichiro
附属フューチャーイノベーションセンター/機械工学専攻 助教
知能制御学講座 機械情報システム制御学領域 澤田・杉本研究室
若手卓越支援部門(若手卓越教員)


キーワード
ロボット、知能、AI
ここがポイント!【研究内容】
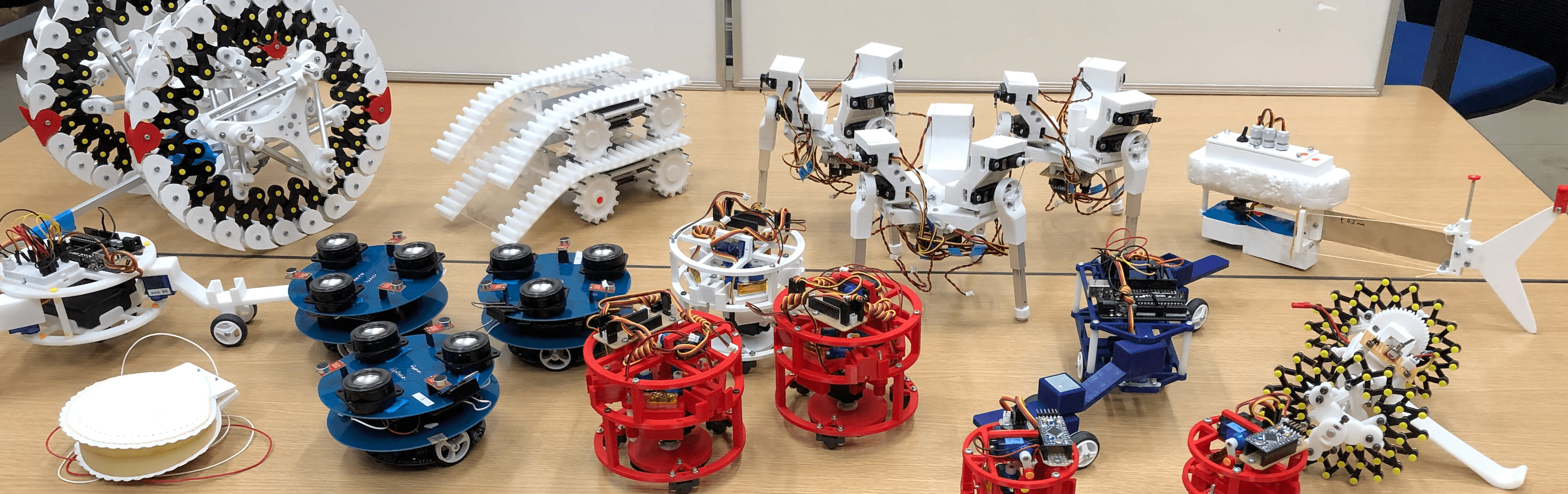
ロボット工学は近年のIoT技術の発展から、今後ますます注目が集まる分野であり、人とロボットがインタラクションする未来には、協調性や社会性を持ったロボットの開発が不可欠である。末岡は、脚やクローラ・車輪といった多種多芸なロボットたちを開発し、人間社会になじみ、また人間では到達できない場所でも協力して仕事を行うことができる革新的なロボット工学の創成にチャレンジしている。
応用分野
ロボット工学、制御工学、IoT技術
論文・解説等
- [1] Y. Sueoka, M. Ishitani, K. Osuka, Robotics, 7(2):21, 2018.
- [2] 原田 高歩, 末岡 裕一郎ほか, 日本機械学会論文集 87(894), p. 20-00112, 2021.
- [3] T. Kida, Y. Sueoka, et al., Journal of Robotics and Mechatronics, 33(1) 2021.
連絡先URL